
徐萌博士为校区学生作题为“SLAM的过去、现在与未来:迈向鲁棒感知时代”的学术报告
发布时间:
2026-05-07
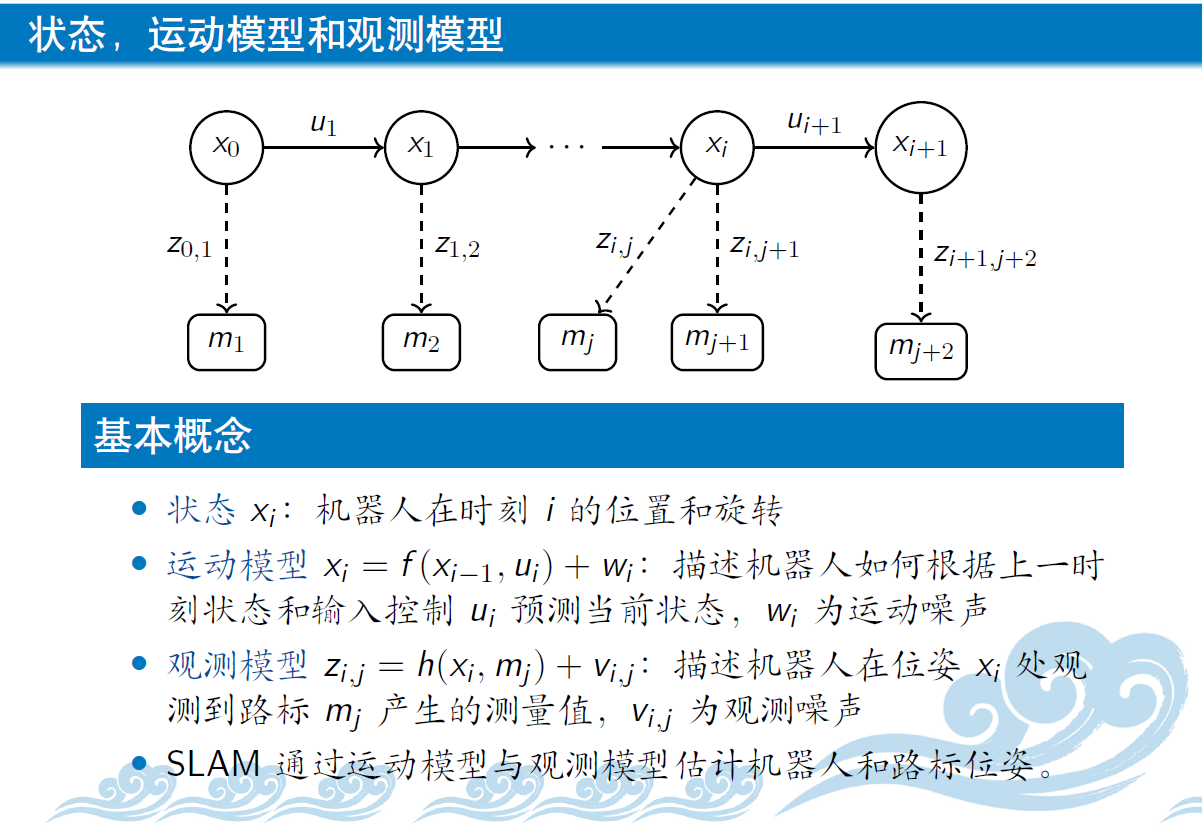
2026年5月6日,信息院2026年系列学术报告会第七讲(总第52期)在学院409会议室成功举办。学院青年教师徐萌博士应邀作题为“SLAM的过去、现在与未来:迈向鲁棒感知时代”的专题学术报告。在报告中,徐萌博士从同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)的基本概念出发,结合概率估计、图优化与多传感器融合理论,系统梳理了SLAM从经典滤波到优化方法,再到鲁棒感知时代的发展脉络,重点阐述了定位、建图、回环检测、数据关联和地图表示等关键问题,说明了SLAM在机器人自主感知中的基础作用。
在应用层面,徐萌博士介绍了视觉SLAM、激光SLAM、视觉惯性SLAM等代表性技术路线,以及长期SLAM、主动SLAM、多机协同SLAM和学习增强SLAM等前沿进展,展示了SLAM在自动驾驶、无人机、服务机器人、数字孪生与具身智能等领域的广泛应用前景。

本次报告全面梳理了SLAM理论、方法与应用的发展主线,为学院师生进一步开展相关研究提供了有益参考。(信息来源:信息科学与工程学院)